Tartalomjegyzék
\[ \newenvironment{dcases}{\left\{\begin{array}{ll}}{\end{array}\right.} \]Isidori I., Example 4.1.4. Feedback linearization
Teljes Matlab script kiegészítő függvényekkel.
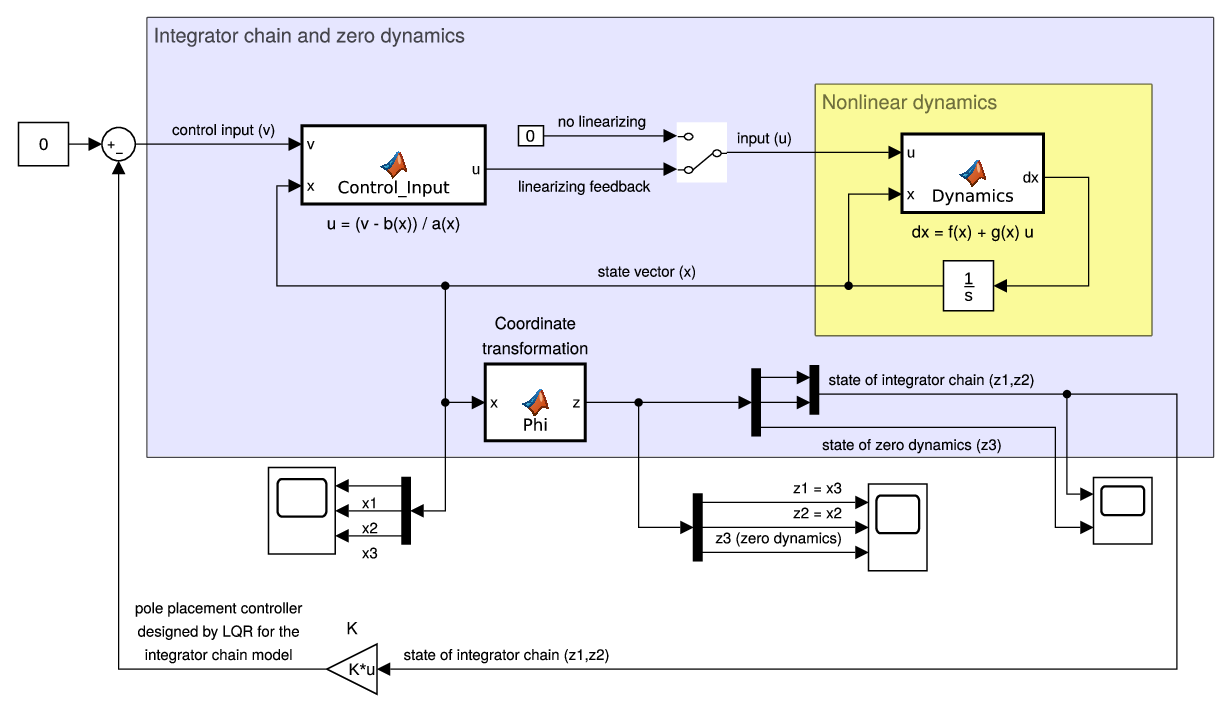
Coordinate transformation, feedback linearization and zero dynamics.
File: ccs_nonlin_Isidori_Ex414_feedbacklin.m Directory: 4_gyujtemegy/11_CCS/_2_nonlin-pannon/2018 Author: Peter Polcz (ppolcz@gmail.com)
Created on 2018. July 29.
Prerequisites (1st Matlab practice)
- Basic symbolic operations
- Lie derivative and Lie bracket
- Nonlinear state transformation
- Pole placement and LQR controller
- Dynamical systems' simulation with Simulink
- Solving general transport PDE with Mathematica
Addition Mathematica calculations
Published Mathematica notebook: Integral_PDE_Public.pdf.
You can download the source notebook: Integral_PDE_Public.nb
Model description
syms t u v real
syms x1 x2 x3 real
syms z1 z2 z3 real
x = [x1 ; x2 ; x3];
z = [z1 ; z2 ; z3];
d = @(g) jacobian(g,x);
Lie = @(f,g) d(g)*f;
br = @(f,g) d(g)*f - d(f)*g;
f = [ -x1 ; x1*x2 ; x2 ];
g = [ exp(x2) ; 1 ; 0 ];
h = x3;
phi3 = 1 + x1 - exp(x2);
Phi = [
h
Lie(f,h)
phi3
];
Phi_fh = matlabFunction(Phi, 'vars', {x});
% Compute equilibrium point
sol = struct2cell(solve(f,x));
xeq = [ sol{:} ]';
zeq = Phi_fh(xeq);
% Quick check: should be zero
% Lie(g,phi3)
Quick check
\begin{align}L_g \phi_3(x) = 0\end{align}$\phi_3(x)$ is given by Isidori, but anyone can check that this is indeed a solution for the PDE. This solution can also be computed by Mathematica.
Phi_inv = struct2cell(solve(z-Phi, x));
Phi_inv = [ Phi_inv{:} ]';
Phi_inv_fh = matlabFunction(Phi_inv, 'vars', {z});
Check if it is indeed the good inverse: $\Phi\big(Phi^{-1}(z)\big) = z$ and $\Phi^{-1}\big(\Phi(x)\big) = x$
simplify(Phi_fh(Phi_inv))
simplify(Phi_inv_fh(Phi))
Output:
ans = z1 z2 z3 ans = x1 x2 x3\begin{align}\Phi^{-1}(z) = \left(\begin{array}{c} z_{3}+{\mathrm{e}}^{z_{2}}-1\\ z_{2}\\ z_{1} \end{array}\right)\end{align}
Coordinate transformation
b = Lie(f, Lie(f,h));
a = Lie(g, Lie(f,h));
q3 = Lie(f, Phi(3));
b = subs(b, x, Phi_inv);
a = subs(a, x, Phi_inv);
q3 = subs(q3, x, Phi_inv);
dz = simplify([ z2 ; collect(b+a*u,u) ; q3 ]);
System dynamics in the new coordinates
\begin{align}\dot z = \left(\begin{array}{c} z_{2}\\ u+z_{2}\,\left(z_{3}+{\mathrm{e}}^{z_{2}}-1\right)\\ -\left(z_{2}\,{\mathrm{e}}^{z_{2}}+1\right)\,\left(z_{3}+{\mathrm{e}}^{z_{2}}-1\right) \end{array}\right)\end{align}Linearizing feedback design
u_fdb = a \ (-b + v);
Closed loop
dz_fdb = simplify(subs(dz, u, u_fdb));
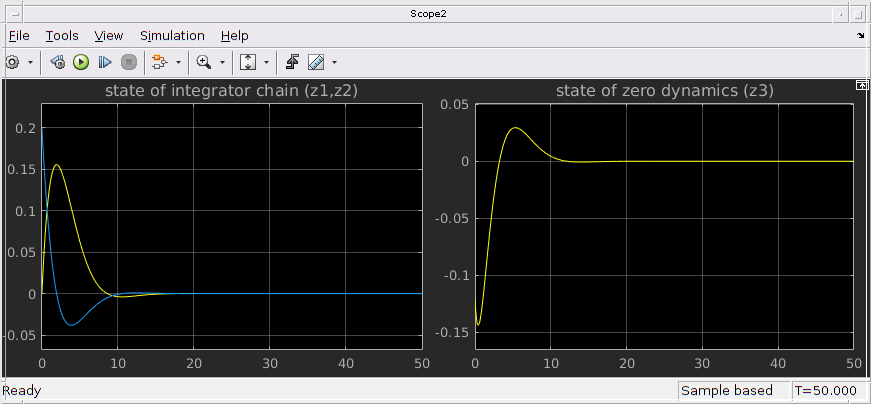
Zero dynamics
Zero_dynamics = simplify(subs(dz_fdb(3), [z ; v], [zeq ; 0]));
The zero dynamics is stable in the origin.
\begin{align}\dot z_3 = 0\end{align}Linearized dynamics
Overall dynamics without the zero dynamics.
A = [
0 1
0 0
];
B = [
0
1
];
C = [ 1 0 ];
sys = ss(A,B,C,0);
s = tf('s');
H = tf(sys)
eps1 = 0.01;
eps2 = 0.01;
H_control = s^2/(eps1*s^2 + eps2*s + 1);
He = minreal(feedback(H*H_control,1))
[POLES, ZEROS] = pzmap(He)
Output:
H =
1
---
s^2
Continuous-time transfer function.
He =
100
-------------
s^2 + s + 200
Continuous-time transfer function.
POLES =
-0.5000 +14.1333i
-0.5000 -14.1333i
ZEROS =
0×1 empty double column vector
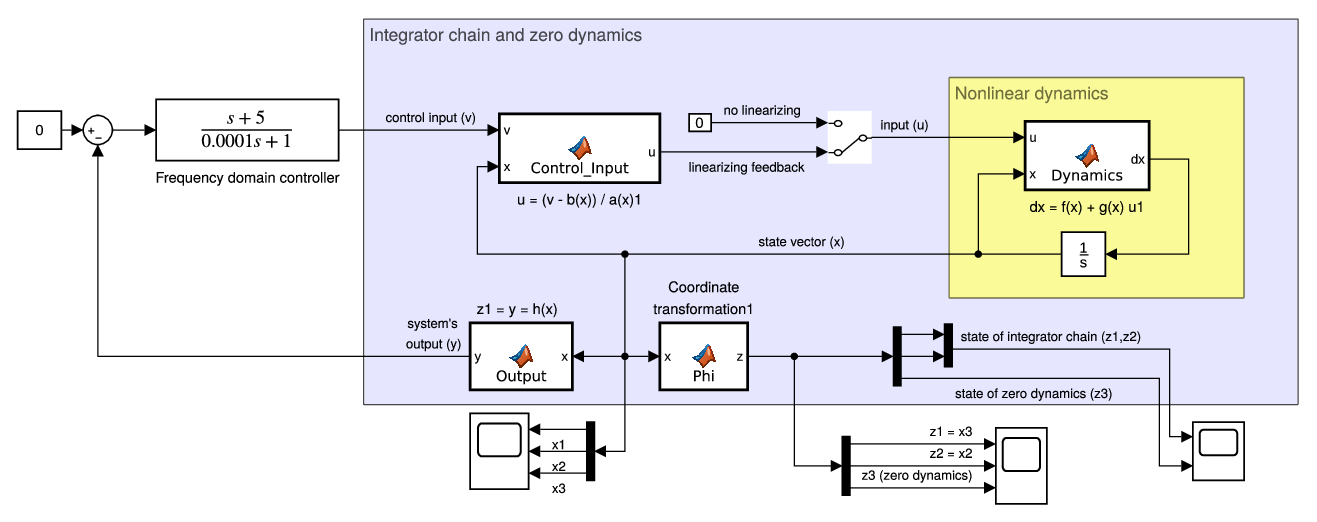
Frequency domain controller for the integrator chain
Transfer function of the feedback controller $H(s) = \frac{s + 5}{\alpha s + 1}$.
Download model here: Isidori_Example414_PID.slx
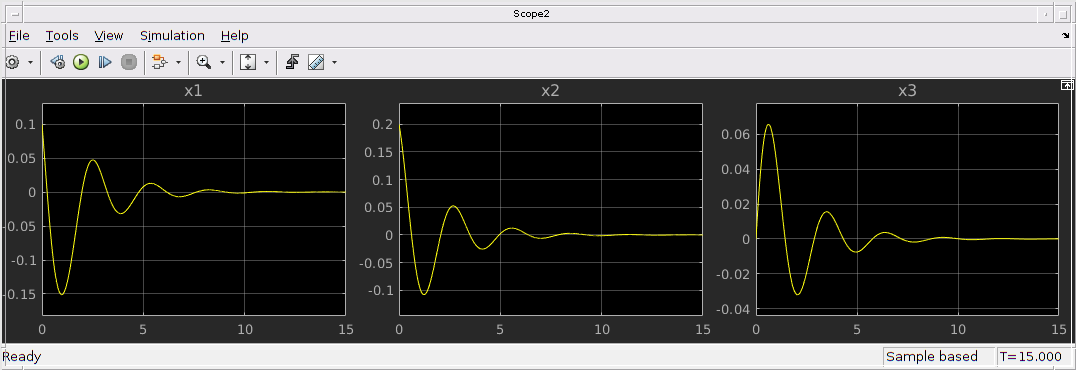
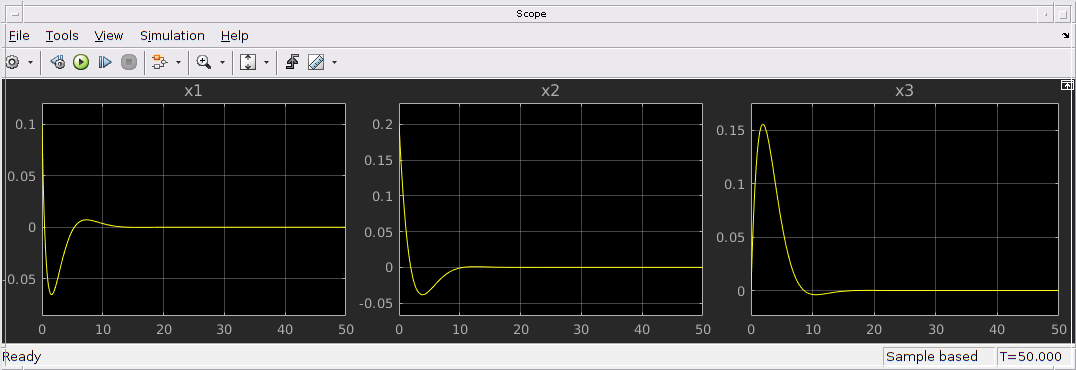
Pole placement controller
Download model here:
% State feedback gain designed by LQR
K = lqr(A,B,0.1*eye(2),1);
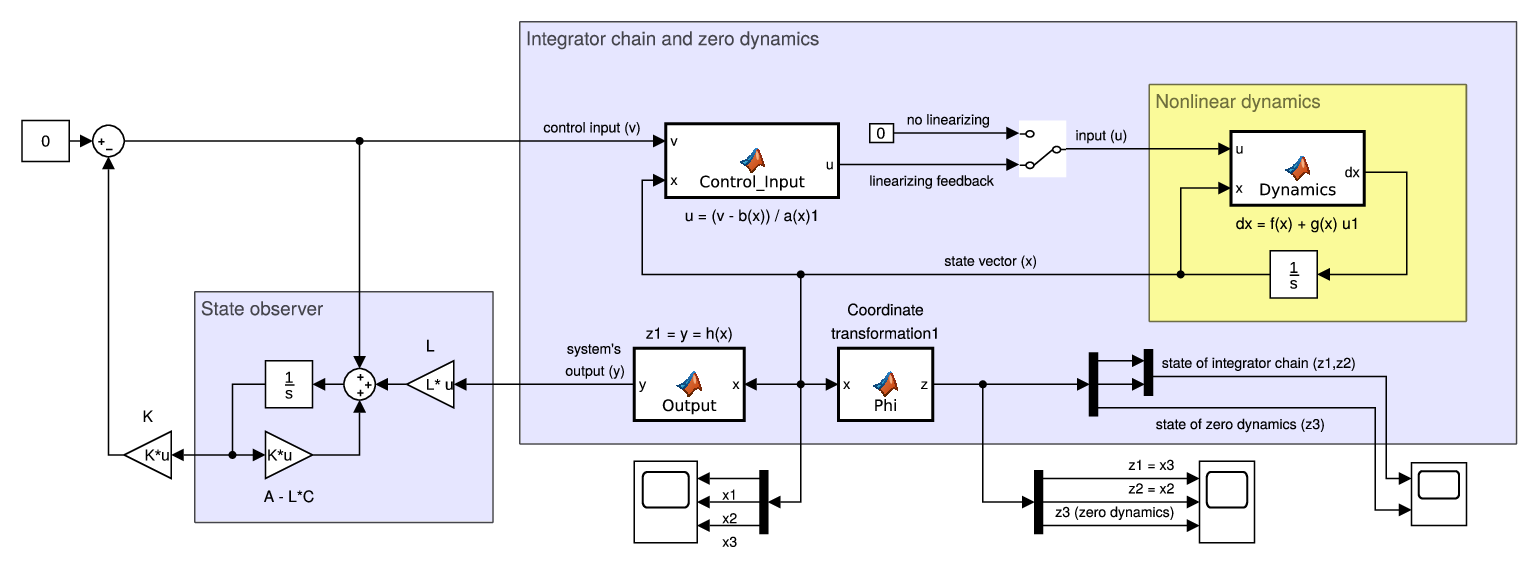
Pole placement controller with observer (just for fun)
Note that when a linearizing feedback is applied, we need to know the full state vector. But we can play a little bit, what if we forget the values of the state variables.
Download model here: Isidori_Example414_obs_state_feedback.slx
% Observer for integrator chain
L = place(A',C',[-2 -3])';
% State feedback gain designed by LQR
K = lqr(A,B,0.1*eye(2),1);