Tartalomjegyzék
\[ \newenvironment{dcases}{\left\{\begin{array}{ll}}{\end{array}\right.} \]Virtual city reconstruction using arial LiDAR point clouds
Kivonat
A háromdimenziós virtuális városmodellek széles körben elterjedtek az utóbbi években, szerepük a megjelenítés mellet különböző elemzési feladatokban is jelentős. Ugyanakkor az adatok mennyisége miatt a modellgenerálás nagyfokú automatizálása kulcsfontosságú a hatékonyság szempontjából.
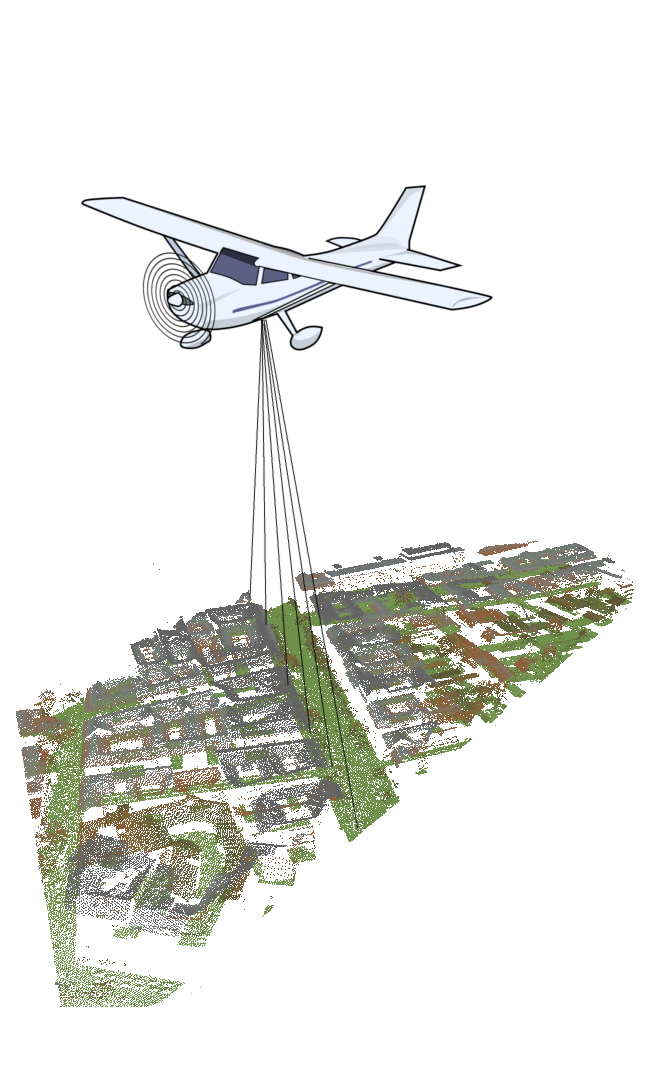
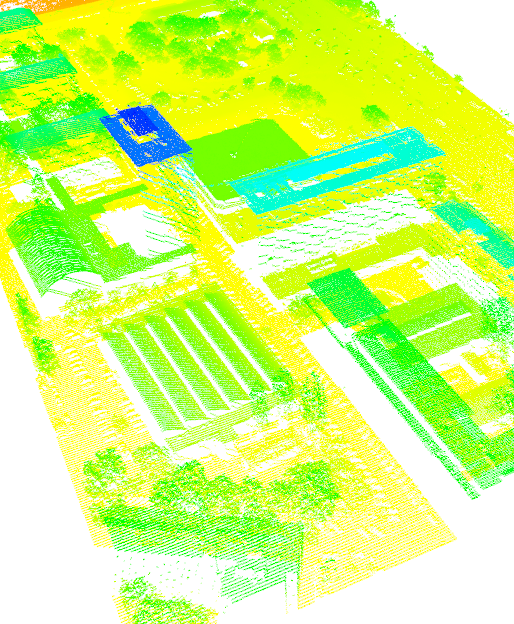
A LiDAR (Light Detection and Ranging) mérési technológia segítségével nagy pontosságú levegőből készített háromdimenziós pontfelhőket kaphatunk különböző földrajzi területekről, ami az optikai úton sztereokép-számítással nyerhető magasságtérkép hatékony alternatívájának számít a városrekonstrukciós feladatokban.
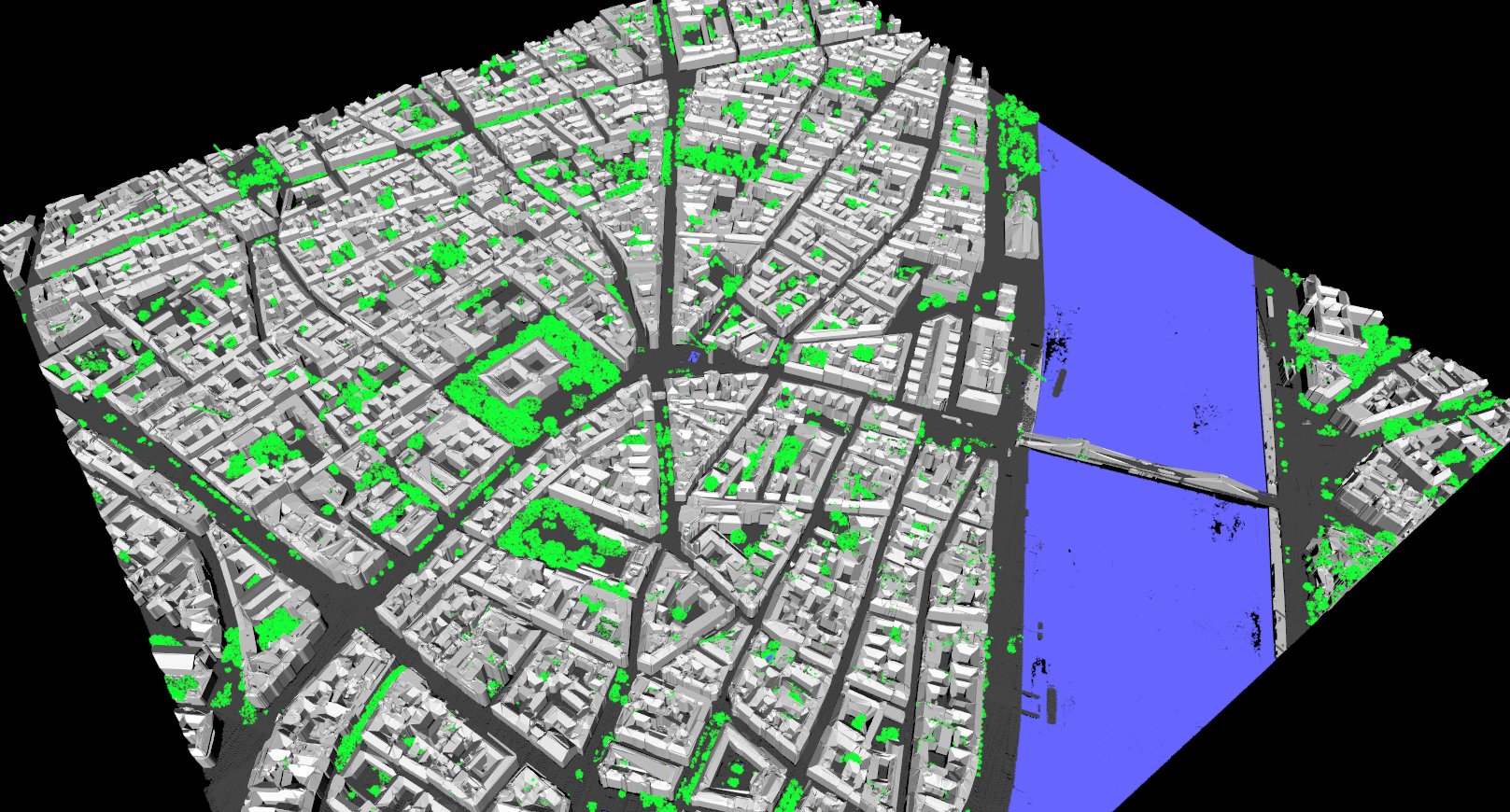
Tudományos diákköri munkám során olyan automatikus és robosztus algoritmusok kifejlesztésére törekedtem, melyek légi LiDAR felvételek feldolgozásával részletekben gazdag háromdimenziós virtuális városmodelleket generálnak. Fontos célnak tűztem ki, hogy a rendszer képes legyen különböző építészeti irányzatot követő háztetőkről is valósághű modelleket rekonstruálni, másrészt akár több négyzetkilométernyi területet lefedő LiDAR mérések feldolgozását is felhasználói beavatkozás nélkül tudjuk elvégezni.
A feldolgozás bemenetét szolgáló Budapest belvárosáról készült nagypontosságú légi LiDAR felvételeket az Infoterra Astrium GEO-Information Services Hungary Kft. bocsátotta rendelkezésünkre. A felvételek mintegy 300 m-es repülési magasságból készültek, az adathalmaz az egyes repülési irányoknak megfelelően 3-6 km hosszú és kb 200 m széles szegmensekből áll, ahol az egyes szegmensek 10-20 millió pontot tartalmaznak.
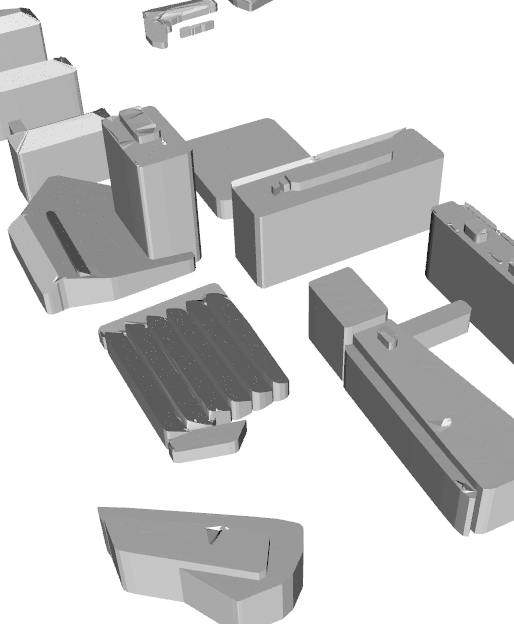
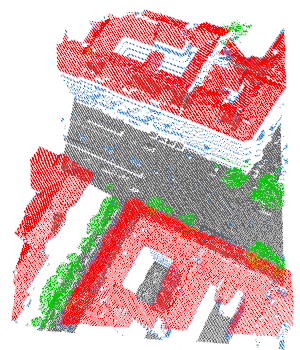
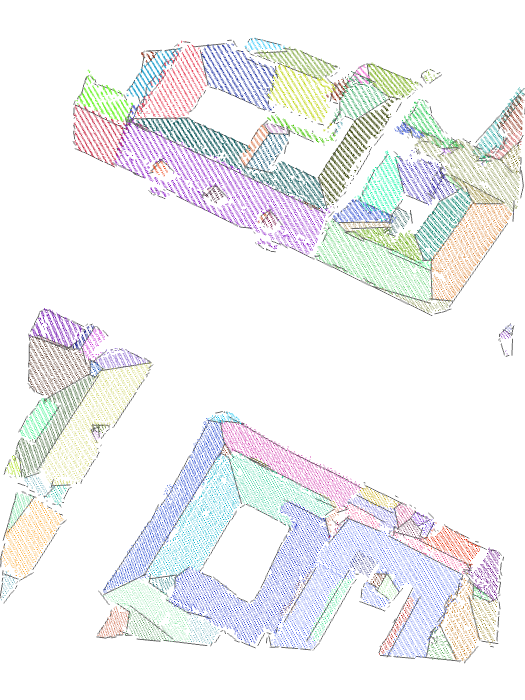
A feladat megvalósításakor felhasználtam a kutatócsoportunkban korábban kifejlesztett pontfelhőosztályozó és előzetes tetőszegmentáló eljárásokat. A munkafolyamathoz a következő algoritmusok kidolgozásával és implementációjával járultam hozzá. A felületnormális alapú tetőszegmentálás alapötletéből kiindulva terveztem egy olyan eljárást, amely a tetőszegmensek határait is figyelembe veszi, így a szomszédos szegmensek résmentesen összeérnek. Algoritmust dolgoztam ki a tetőrészek éleinek detektálására, és ezek alapján történő poligon felületek generálásra. Gondot jelentett, hogy mivel a felhasznált háromszögelési eljárások a tetőszegmensek konvex burkára illesztik a felületmodellt, konkáv tetőszegmensek homorú külső részeiben hamis háromszögek keletkezhetnek. Erre a problémára egy Markov véletlen mezős eljárást adtam, melynek segítségével kiszűrtem a hibásan megjelenő háromszögeket. Az eljárásokat megvalósító szoftvert alkalmassá tettem nagy területet lefedő mérési adatok feldogozására, módszereim hatákonyságát egy $240m\times2.3km$ területű és kisebb $200m^2$-es régiók mérési adatain teszteltem. A megfigyelt eredmények alapján a szoftver robosztusnak bizonyult.
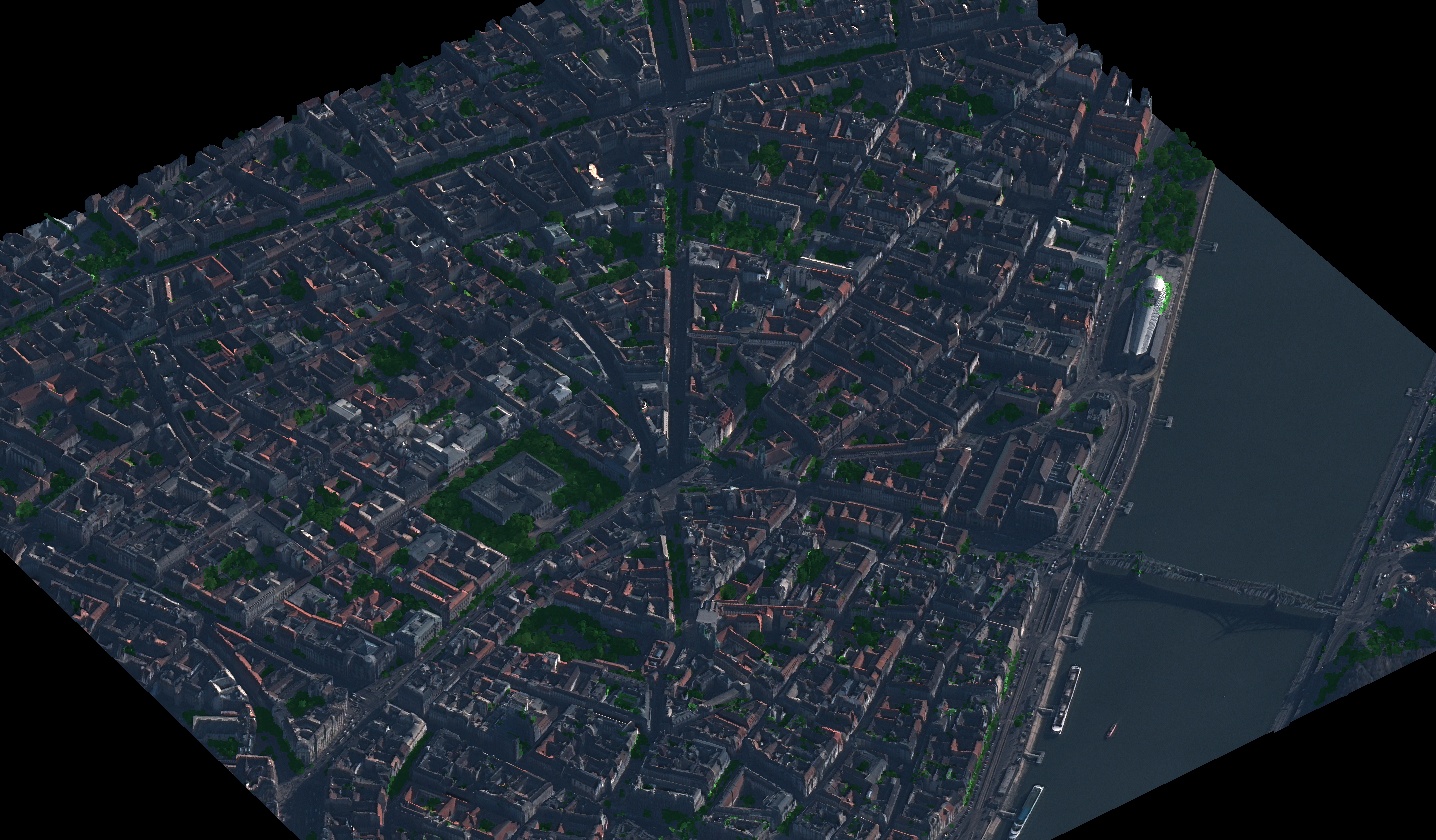
Az elkészült algoritmusokat az MTA SZTAKI Elosztott Események Elemzése Laboratóriumában folyó és az Európai Űrügynökség által támogatott DUSIREF projektben szeretnénk felhasználni a jövőben, különböző légi és földi pontfelhő alapú gépi felismerő eljárásaink eredményeinek a megjelenítéséhez. Másrészt az elkészült háromdimenziós modelleket különböző időpontokban készül űrképekkel szeretnénk összevetni, megvizsgálva az adaptív textúrázhatóság és a változásdetekció lehetőségeit.
Lásd: 3D modell. Ennek megjelenítése WebGL-t igényel.
Abstract
Three dimensional urban scene modelling became important issue in the last few years. Beside visual experience, 3D city modelling has gained a significant function in diverse analysing tasks, however the amount of data requests a high level of automation of model generation.
LiDAR (Light Detection and Ranging) measurement technologies provide high resolution three-dimensional aerial point clouds with a high accuracy from different geographical areas. This type of data is considered as an effective alternative solution of elevation models generated by optical stereo images.
In my work for the Students’ Scientific Competition, I aim to design automatic and robust algorithms in order to produce detailed 3D virtual city models by analysing the aerial LiDAR measurements. An important goal to work out is to construct realistic models for rooftops following different architectural trends, and to process large LiDAR measurements covering areas of several square kilometers without user interraction.
As input, we have used high resolution LiDAR records of Budapest city center, which have been provided by Infoterra Astrium GEO-Information Services Hungary. The measurements were taken in an altitude of $300m$, and the data set corresponding to each flight directions covers a $3-6\ km$ long and $200m$ wide area, where each set contains 10-20 million points.
Pursuing my task, I have used a point cloud classification and a preliminary roof segmentation procedure developed by our research group. I have contributed to the process workflow with the following algorithms and implementations. Proceeding from the idea of the surface normal based roof segmentation I have designed a procedure, which takes into account the boundaries of each roof segment, so that the adjacent segments connect without gaps. I have developed an algorithm to detect 3D edge lines of the rooftops, and a further polygon generator on the basis of these boundary lines. Since the applied triangulation methods operate on the whole convex hull of the input points, hollow outer parts of the roof segments are filled in with false triangles. To solve this problem, I have proposed a method using a Markov Random Field, in which I filter out the incorrect triangles lying on the concave parts. In order to process large datasets, I have developed a software on the basis of the previously mentioned functions, and I have been tested it on a cloud of 8 million points covering a $240m\times2.3km$ large region and on other datasets of smaller territories having area up to $200m^2$. Based on the observed results the software proved to be robust.
In the future, the designed algorithms are intended to be used in the ongoing DUSIREF project of Distributed Events Analysis Research Laboratory of MTA SZTAKI which project is funded by the European Space Agency. Here the synthesized city model will provide a 3D visualization environment, where the results of different terrestrial or aerial LiDAR based computer vision and machine recognition procedures can be displayed.
Furthermore, the obtained three-dimensional models will be compared with satellite photos taken at different times, analysing the possibilities of adaptive texturing and change detection.
Letölthető dokumentum: OTDK dolgozat
Gallery