Tartalomjegyzék
\[ \newenvironment{dcases}{\left\{\begin{array}{ll}}{\end{array}\right.} \]Meaning of involutive distribution
Teljes Matlab script kiegészítő függvényekkel.
File: involutive.m Directory: 4_gyujtemegy/11_CCS/_2_nonlin-pannon/2018 Author: Peter Polcz (ppolcz@gmail.com)
Created on 2018. July 27.
Inherited from
file: nonlin_distributions_coordinate_systems.m author: Peter Polcz <ppolcz@gmail.com>
Created on 2017.06.04. Sunday, 14:57:05
Requires
Canonic basis vectors in polar coordinates
syms x y theta r real
assumeAlso(in(r,'positive'))
r = [x;y];
r_prime = [r;theta];
R = [sqrt(x^2 + y^2) ; atan(y/x) ];
J = jacobian(R, r);
Rp = [r*cos(theta) ; r*sin(theta)];
Jp = jacobian(Rp, r_prime);
% simplify(subs(simplify(subs(Jp * J, Zi, Rp)), sign(r), 1))
% simplify(subs(simplify(subs(Jp * J, Zip, R)), sign(r), 1))
f_sym = [
-y
x
];
g_sym = [
x
y
] / sqrt(x^2 + y^2);
br_fg = simplify(jacobian(g_sym,r)*f_sym - jacobian(f_sym,r)*g_sym)
f_fh = matlabFunction(f_sym,'vars',{'t' r});
g_fh = matlabFunction(g_sym,'vars',{'t' r});
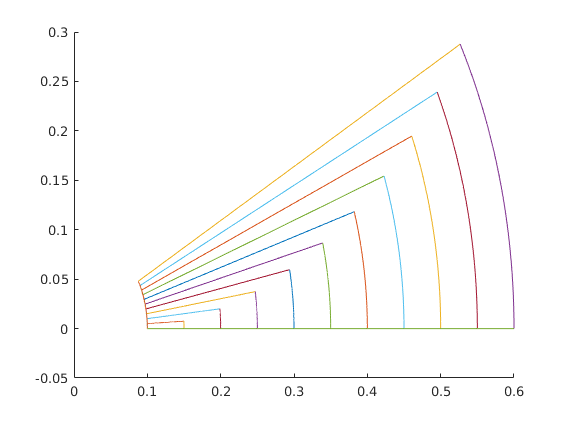
figure, hold on
for h = linspace(0.05,0.5,10)
x0 = [0.1,0];
N = 1000;
[~,p1] = ode45(f_fh, linspace(0,h,N), x0);
[~,p2] = ode45(g_fh, linspace(0,h,N), p1(end,:)');
[~,p3] = ode45(@(t,x) -f_fh(-t,x), linspace(0,h,N), p2(end,:)');
[~,p4] = ode45(@(t,x) -g_fh(-t,x), linspace(0,h,N), p3(end,:)');
plot(p1(:,1),p1(:,2)),
plot(p2(:,1),p2(:,2)),
plot(p3(:,1),p3(:,2)),
plot(p4(:,1),p4(:,2)),
end
Output:
br_fg = 0 0
vekanal_quiver_sym(f_sym, r, {0,1,20}, {0,1,20})
vekanal_quiver_sym(g_sym, r, {0,1,20}, {0,1,20})
Output:
ans =
Quiver with properties:
Color: [0.3010 0.7450 0.9330]
LineStyle: '-'
LineWidth: 0.5000
XData: [20×20 double]
YData: [20×20 double]
ZData: []
UData: [20×20 double]
VData: [20×20 double]
WData: []
Use GET to show all properties
ans =
Quiver with properties:
Color: [0.6350 0.0780 0.1840]
LineStyle: '-'
LineWidth: 0.5000
XData: [20×20 double]
YData: [20×20 double]
ZData: []
UData: [20×20 double]
VData: [20×20 double]
WData: []
Use GET to show all properties

Cycloid coordinate system
syms x y t r real
assume(in(r,'real') | in(r,'positive'))
Z = [x;y];
Zp = [r;t];
R = [
r*(t-sin(t))
r*(1-cos(t))
];
J = jacobian(R,Zp)
Output:
J = [ t - sin(t), -r*(cos(t) - 1)] [ 1 - cos(t), r*sin(t)]
syms x1 x2 x3 real
x = [x1;x2;x3];
tau1 = [
cos(x3)
sin(x3)
0
];
tau2 = [
0
0
1
];
jacobian(tau2,x)*tau1 - jacobian(tau1,x)*tau2
f_sym = @(t,x) [
sin(x(1))
cos(x(2))
];
g_sym = @(t,x) [
-cos(x(1))
sin(x(2))
];
figure, hold on
for h = linspace(0.05,0.5,10)
x0 = [1,1];
N = 1000;
[~,p1] = ode45(f_sym, linspace(0,h,N), x0);
[~,p2] = ode45(g_sym, linspace(0,h,N), p1(end,:)');
[~,p3] = ode45(@(t,x) -f_sym(-t,x), linspace(0,h,N), p2(end,:)');
[~,p4] = ode45(@(t,x) -g_sym(-t,x), linspace(0,h,N), p3(end,:)');
plot(p1(:,1),p1(:,2)),
plot(p2(:,1),p2(:,2)),
plot(p3(:,1),p3(:,2)),
plot(p4(:,1),p4(:,2)),
end
Output:
ans =
sin(x3)
-cos(x3)
0
