Tartalomjegyzék
\[ \newenvironment{dcases}{\left\{\begin{array}{ll}}{\end{array}\right.} \]Analízis III - I. Vektoranalízis
Teljes Matlab script kiegészítő függvényekkel.
Különböző differenciálok, differenciálási szabályok, vonalintegrálok, felületintegrálok
File: anal3_vekanal_1.m Directory: 2_demonstrations/oktatas/anal3/1_vekanal Author: Peter Polcz (ppolcz@gmail.com)
Created on 2017.08.04. Friday, 15:15:13 Created on 2018. September 23.
Az elkövetkezendőkben a Matlab Symbolic Math Toolbox (SMT) által kínált vektoranalízis (MathWorks) függvényeit használjuk: curl, divergence, gradient, jacobian, hessian, laplacian, stb...
További általan definiált vektoranalízishez kapcsolódó segédfüggvények (vekanal_) megtalálható a demonstrations GitHub repository-ban, a lib/matlab mappában:
% SMT examples
web(fullfile(docroot, 'symbolic/examples.html'))
% SMT vector analysis
web(fullfile(docroot, 'symbolic/vector-analysis-1.html'))
Divergencia, rotáció, gradiens, Jacobi mátrix számítása
Egy vektormező divergenciájának kiszámítása és ábrázolása
syms x y real
r = [x;y];
2D vektormező
F = [
sin(x)
cos(y)
];
Divergencia szimbolikus kiszámítása
divF = divergence(F,r);
Szimbolikus skalárfüggvény numerizálása és ábrázolása
Mindenekelőtt létrehozok egy gridet, amelynek pontjait egyesével be kell helyettesíteni a szimbolikus függvénybe.
[xx,yy] = ndgrid(linspace(-4,4,30));
A behelyettesítés megoldható a subs paranccsal, ami viszont igen lassú. Ehelyett a szimbolikus függvényt anoním függvénnyé (function handle-vé) alakítom.
divF_fh = matlabFunction(divF)
Output:
divF_fh =
function_handle with value:
@(x,y)cos(x)-sin(y)
Majd az anoním függvénybe behelyettesítem az értékeket. Ez lényegesen gyorsabb. A objektumok dimenzióira azonban nagyon vigyázni kell: xx és yy változók két dimenziós tömbbök. Érdemes őket 1 dimenziós tömbökké alakítani (jelen esetben 2D tömbökként is működne, de ha vektormezővel akarom ezt megtenni akkor a 2D tömbbök nagyon bekavarnak).
xx_1D = xx(:);
yy_1D = yy(:);
Most fog megtörténni a behelyettesítés:
divF_num_1D = divF_fh(xx_1D, yy_1D);
Visszaalakítás 2D-be
divF_num = reshape(divF_num_1D, size(xx));
Ennek egyszerűsítése végett létrehoztam egy vekanal_subsmesh függvényt, mely pontosan ezt a műveletet végzi el. Így kellene meghívni:
divF_num = vekanal_subsmesh(divF, r, {xx,yy});
figure('Position', [ 672 550 1149 430 ])
subplot(121), mesh(xx,yy,divF_num), hold on
title(sprintf('$F = %s, ~~ \\nabla F = %s$', latex(F'), latex(divF)), ...
'interpreter', 'latex')
subplot(122), surf(xx,yy,divF_num, 'facealpha', 0.5), shading interp, grid off
view(0,90), axis equal, axis tight, hold on, colorbar
drawnow

Szimbolikus vektormező numerizálása és ábrázolása
Most ábrázoljuk a vektormezőt (majdnem ugyanaz a procedúra, egy kicsit nehezebb).
[F1,F2] = vekanal_subsmesh(F, r, {xx,yy});
subplot(121), quiver3(xx,yy,divF_num,F1,F2,F2*0,1.5)
subplot(122), quiver3(xx,yy,divF_num,F1,F2,F2*0,1.5)
drawnow

Deriváltak számítása
syms x y z real
r = [x;y;z];
% Vektormező
F = [
x^2*y
y*z
x*y*z^2
];
% Skalármező
f = sin(x)*cos(y)*z^2;
% Gradiens r = (x,y,z) szerint
grad_f = jacobian(f,r);
% Gradiens r = (x,y,z) szerint
grad_f_2 = gradient(f,r);
% Divergencia r = (x,y,z) szerint
div_F = divergence(F,r);
% Rotacio r = (x,y,z) szerint
rot_F = curl(F,r);
% Jacobi matrix r = (x,y,x) szerint
Jacobian_F = jacobian(F,r);
Vektoranalízis deriválási szabályainak ellenőrzése (bonyolultabb)
Először deklaráljuk a szimbólikus objektumokat
syms x y z real
r = [x;y;z];
syms f(x,y,z) g(x,y,z)
syms F1(x,y,z) F2(x,y,z) F3(x,y,z)
syms G1(x,y,z) G2(x,y,z) G3(x,y,z)
F(x,y,z) = [
F1
F2
F3
];
G(x,y,z) = [
G1
G2
G3
];
% Gradiens, divergencia, rotáció, vektoriális szorzat műveletek
grad = @(f) jacobian(f,r);
trans = @(F) reshape(F,[1 3]);
% grad: sorvektor
% gradient: oszlopvektor
% cross: olyan lesz a vegeredmeny mint amilyen az elso
SYM_EQUAL = @(f,g) ~any(double(simplify(f-g)));
% Végül a szabályok ellenőrzése, nullát kell kapjunk minden esetben
if SYM_EQUAL(grad(f*g), f*grad(g) + g*grad(f))
disp 'f*grad(g) + g*grad(f)'
end
if SYM_EQUAL(divergence(f*F,r), grad(f)*F + f*divergence(F,r))
disp '∇(f F) = ⟨∇f,F⟩ + ⟨f,∇F⟩'
end
if SYM_EQUAL(curl(f*F), cross(gradient(f),F) + f*curl(F))
disp '∇×(f F) = ∇f×F + f ∇×F'
end
if SYM_EQUAL(divergence(cross(F,G),r), transpose(G)*curl(F) - transpose(F)*curl(G))
disp '∇(F×G) = ⟨G,∇×F⟩ - ⟨F,∇×G⟩'
end
if SYM_EQUAL(grad(transpose(F)*G), transpose(F)*grad(G) + transpose(G)*grad(F))
disp '∇⟨F,G⟩ = ⟨F,∇G⟩ + ⟨G,∇F⟩'
end
Output:
f*grad(g) + g*grad(f) ∇(f F) = ⟨∇f,F⟩ + ⟨f,∇F⟩ ∇×(f F) = ∇f×F + f ∇×F ∇(F×G) = ⟨G,∇×F⟩ - ⟨F,∇×G⟩ ∇⟨F,G⟩ = ⟨F,∇G⟩ + ⟨G,∇F⟩
Numerikus integrálás
Az ode45 függvény
Az ode45 egy numerikus solver, mely a $\frac{\mathrm{d} x}{\mathrm{d} t} = f(t,x)$ közönséges nemlineáris differenciál egyenletet oldja meg negyed- vagy ötödrendű Runge-Kutta módszerrel, változó időbeni $T_s$ lépésközzel. A differenciál egyenletben az ismeretlen egy $x: \mathbb{R} \mapsto \mathbb{R}^n$ időtől függő vektor értékű függvény.
Ezt a megoldót numerikus primitívfüggvény keresésére is használhatjuk. Legyen $F:\mathbb{R} \mapsto \mathbb{R}^n$ az ismeretlen vektor értékű $x$-ben változó függvény. Ismerjük $F$ függvény deriváltját: $F'(x) = f(x)$ és $F$ értékét $x_0$ pontban. Ekkor $F(x) = \int_{x_0}^{x}f(s)\mathrm{d}s$.
f = @(x,~) 2*x; % ez lehetne valami extémebb függvény is
x0 = 0; x_max = 5; F0 = -1;
[x,F] = ode45(f,[x0 x_max],F0);
figure, plot(x,F)
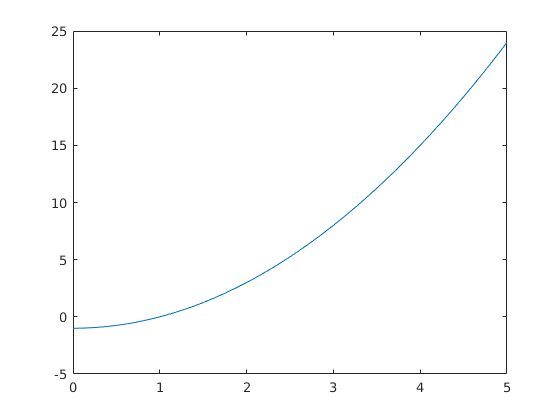
Az ode45 által visszaadott $m\times n$ méretű F tömb az $F(x)$ primitív függvény értékeit fogja tartalmazni az $x_i$, $i\in\{1,...,m\}$ pontokban, az $m\times 1$ méretű x tömb pedig az $x_i$ értékeket.
Az integral függvény
Az integral(fun,a,b) függvény kiszámítja egy |fun| anonim függvénnyel adott egyváltozós függvény határozott integrálját $D = [a,b]$ intervallumon. Számoljuk ki a következő integrált: $$\int\limits_0^{\frac{\pi}{2}} 4\cos(x)\sin(x)^2 - \cos(x)^2\sin(x) ~\mathrm{d}x$$
f = @(x) 4*cos(x).*sin(x).^2 - cos(x).^2.*sin(x);
a = 0;
b = pi/2;
I = integral(f, a,b)
Output:
I =
1.0000
Vonalintegrál felületintegrál
Matlabban számítsuk ki numerikusan mekkora munkát gyakorol egy $\vec F(\vec r)$ erőtér egy anyagi pontra, miközben az anyagi pont a $\Gamma$ által leírt görbe mentén halad. Magyarán szólva, integráld az $\vec F(\vec r)$ vektormezőt $\Gamma$ görbe mentén. $\vec F(\vec r)$ és $\Gamma$ tetszőlegesen megválasztható, támpontként szolgálhat az 1. gyakorlat 5-7. feladata. Ugyanazokat a függvényeket is lehet használni.
Támpont
- Definiáljunk egy $x$ és $y$-tól függő F, majd egy $t$-től függő gamma szimbolikus függvényt.
- $\gamma(t)$ deriváltjának kiszámításához használjuk a diff parancsot.
- A subs parancs segítségével helyettesítsük be [x;y] helyébe a gamma-t, hogy megkapjuk $\vec F(\vec \gamma(t))$-t.
- A szimbolikus t változótól függő integrandust alakítsuk anoním függvénnyé a matlabFunction segítségével. Nevezzük el (pl.) Integrand_fh-nek
- Végül hívjuk meg az integral parancsot numerikus integrálás végett:
I = integral(Integrand_fh,t0,t1)
Matlabban számítsuk ki numerikusan mekkora a hozama egy $\vec F(\vec r)$ vektormező által leírt áramlásnak egy $\vec S(u,v)$ paraméteresen megadott felületen keresztül.
Vagyis: \begin{align} \int_S \vec F(\vec{r}) \mathrm{d}\vec{S} = \int_S F(\vec{r}) \vec{n}\mathrm{d} S = ? \end{align}
Támpont
Az eljárás majdnem ugyanaz mint vonalintegrál esetén, kettős integrál kiszámításához pedig használjátok az integral2 függvényt.
Vonalintegrál kiszámítása szimbolikus határozatlan integrálás segítségével
Integráljuk $\vec F(x,y)$-t $\Gamma$ mentén.
syms t x y a b real
r = [x;y];
$\vec F(x,y) = \vec F(\vec r)$ kétdimenziós vektormező
F = [
x^2
y^2
];
$\Gamma$ origó középpontú negyed ellepszis. Tengelyeinek hossza $2a$ és $2b$. Kezdőpont $A(a,0)$, végpont $B(0,b)$.
g = [
a*cos(t)
b*sin(t)
];
% Integrálási tartomány:
t1 = 0;
t2 = pi/2;
Integrálandó függvény: $\left<\vec F\big(\vec \gamma(t)\big),\dot{\vec \gamma}(t)\right>$
Integrand = subs(F,r,g)' * diff(g, t);
pcz_pretty('Integrálandó függvény', Integrand)
Output:
Integrálandó függvény = 3 2 3 2 b cos(t) sin(t) - a cos(t) sin(t)
Szimbolikus határozatlan integrálás
Integral = int(Integrand, t)
Output:
Integral = (b^3*sin(t))/3 + (a^3*cos(t)^3)/3 - (b^3*cos(t)^2*sin(t))/3
Határok behelyettesítése
I = subs(Integral,t,t2) - subs(Integral,t,t1)
Output:
I = b^3/3 - a^3/3
Matlabos ügyeskedéssel így is lehet. FIGYELEM: Integral(t) nem egy anoním függvény. Integral(t1) esetén implicite meghívódik a subs parancs.
Integral(t) = int(Integrand, t)
I = Integral(t2) - Integral(t1)
Output:
Integral(t) = (b^3*sin(t))/3 + (a^3*cos(t)^3)/3 - (b^3*cos(t)^2*sin(t))/3 I = b^3/3 - a^3/3
Vonalintegrál kiszámítása szimbolikus határozott ill. numerikus módszer segítségével
syms t x y z real
r = [x;y;z];
$\vec F(x,y,z) = \vec F(\vec r)$ háromdimenziós vektormező
F = [
3*x^2*y^2*z
2*x^3*y*z
x^3*y^2
];
$\Gamma$: Az origót az (1,2,3) ponttal összekötő szakasz.
g = t * [1;2;3];
% Integrálási tartomány:
t1 = 0;
t2 = 1;
Integrálandó függvény: $\left<\vec F\big(\vec \gamma(t)\big),\dot{\vec \gamma}(t)\right>$
Integrand = subs(F,r,g)' * diff(g, t)
Output:
Integrand = 72*t^5
Szimbolikus határozatlan integrálás
Integral = int(Integrand, t)
Output:
Integral = 12*t^6
Szimbolikus határozott integrálás
Integral = int(Integrand, t, t1, t2)
Output:
Integral = 12
Polinomközelítéses numerikus eljárással (először anoním függvénnyé kell alakítani)
Integrand_fh = matlabFunction(Integrand);
Integral = integral(Integrand_fh, t1, t2)
Output:
Integral =
12
Felületintegrál számítása
syms u v real
syms x y z real
r = [x;y;z];
Vektormező
F = [
x^2*sin(z)
x*y
z^2*x
];
Felület paraméteres megadása
S = [
sin(u)*cos(v)
sin(u)*sin(v)
cos(u)
];
$\mathrm{d}\vec{S} = \left(\vec S'_u \times \vec S'_v \right) \mathrm{d}(u,v)$ számítása
dSu = jacobian(S,u)
dSv = jacobian(S,v)
dS = simplify(cross(dSu, dSv))
Output:
dSu =
cos(u)*cos(v)
cos(u)*sin(v)
-sin(u)
dSv =
-sin(u)*sin(v)
cos(v)*sin(u)
0
dS =
cos(v)*sin(u)^2
sin(u)^2*sin(v)
sin(2*u)/2
$\vec F(\vec r)$-be helyettesítjük $\vec S(u,v)$-t.
FSuv = subs(F,r,S)
Output:
FSuv =
sin(cos(u))*cos(v)^2*sin(u)^2
cos(v)*sin(u)^2*sin(v)
cos(u)^2*cos(v)*sin(u)
Itegrálandó: $\left<\vec F\big(\vec S(u,v)\big), \vec S'_u \times \vec S'_v\right>$
Integrand = FSuv' * dS
Output:
Integrand = sin(cos(u))*cos(v)^3*sin(u)^4 + cos(v)*sin(u)^4*sin(v)^2 + (sin(2*u)*cos(u)^2*cos(v)*sin(u))/2
Anoním függvénnyé alakítás
Integrand_fh = matlabFunction(Integrand,'vars',{u v})
Output:
Integrand_fh =
function_handle with value:
@(u,v)sin(cos(u)).*cos(v).^3.*sin(u).^4+cos(v).*sin(u).^4.*sin(v).^2+sin(u.*2.0).*cos(u).^2.*cos(v).*sin(u).*(1.0./2.0)
Integrálás $u = \left[\frac{\pi}{6},\frac{\pi}{3}\right]$, $v = \left[\frac{\pi}{4},\frac{\pi}{2}\right]$ tartományon.
integral2(Integrand_fh,pi/6,pi/3,pi/4,pi/2)
Output:
ans =
0.0617