Tartalomjegyzék
\[ \newenvironment{dcases}{\left\{\begin{array}{ll}}{\end{array}\right.} \]Script sim_nonlinear_model_demo
Teljes Matlab script kiegészítő függvényekkel.
File: sim_nonlinear_model_demo.m Author: Peter Polcz <ppolcz@gmail.com>
Created on 2017. November 02.
try c = evalin('caller','persist'); catch; c = []; end
persist = pcz_persist(mfilename('fullpath'), c); clear c;
persist.backup();
%clear persist
global PUBLISH
PUBLISH = 1;
Output:
│ - Persistence for `sim_nonlinear_model_demo` reused (inherited) [run ID: 48, 011]Persistence for `2017.11.02. Thursday, 19:43:47` │ - Script `sim_nonlinear_model_demo` backuped
Generate snapshots
open_system 'sim_nonlinear_model'
print -dpng '-ssim_nonlinear_model' fig/sim_nonlinear_model.png
print -dpng '-ssim_nonlinear_model/Nonlinear Crane Model' fig/sim_nonlinear_model_2.png
print -dpng '-ssim_nonlinear_model/Nonlinear Crane Model/Linear and nonlinear system model' ...
fig/sim_nonlinear_model_3.png
Simulink simulation
Download Simulink model (sim_nonlinear_model.slx)
Simulink model:
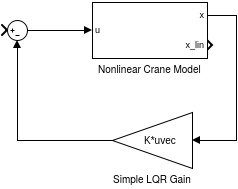
Nonlinear crane model:
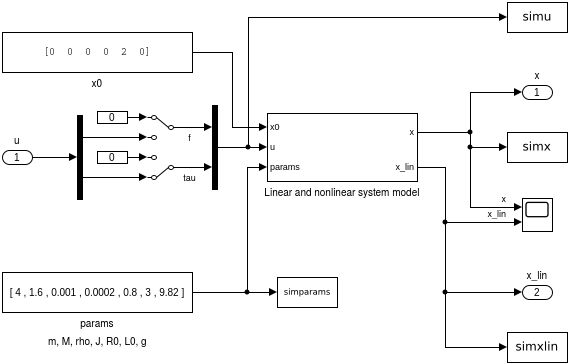
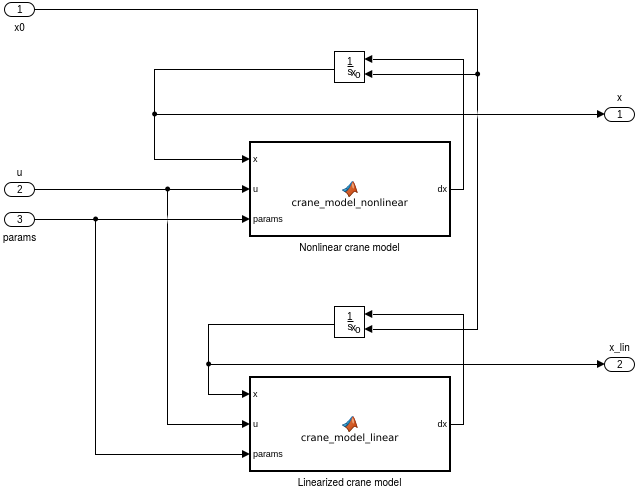
Linear and nonlinear system model:
Simulation without any control. However, the length of the crane $l(t)$ is controlled, otherwise it tends to $-\infty$.
simout = sim('sim_nonlinear_model');
simulate_crane